Difference between revisions of "Documentation/Nightly/Modules/GyroGuide"
m |
|||
| (One intermediate revision by the same user not shown) | |||
| Line 9: | Line 9: | ||
{{documentation/{{documentation/version}}/module-introduction-row}} | {{documentation/{{documentation/version}}/module-introduction-row}} | ||
Extension: [[Documentation/{{documentation/version}}/Extensions/GyroGuide|GyroGuide]]<br> | Extension: [[Documentation/{{documentation/version}}/Extensions/GyroGuide|GyroGuide]]<br> | ||
| + | [[File:GyroGuide.png|150px]]<br> | ||
Acknowledgments: | Acknowledgments: | ||
This work is supported by International Scientific and Technical Cooperation Project of Zhejiang Province (Grant 2012C34G2020027)<br> | This work is supported by International Scientific and Technical Cooperation Project of Zhejiang Province (Grant 2012C34G2020027)<br> | ||
| Line 21: | Line 22: | ||
{| | {| | ||
*The module should be used in cooperation with “Markups” module. First, it is required to choose five fiducial points to define two mutually-perpendicular planes as the Registration Markers. Second, set a target point and an entry point. Third, click the “Calculate” button to obtain the puncture path information, including the puncture depth and the angles between the puncture path and the reference planes. Finally, these results are displayed on a monitor or transmitted to the gyroscope-based device to assist the surgical operation. | *The module should be used in cooperation with “Markups” module. First, it is required to choose five fiducial points to define two mutually-perpendicular planes as the Registration Markers. Second, set a target point and an entry point. Third, click the “Calculate” button to obtain the puncture path information, including the puncture depth and the angles between the puncture path and the reference planes. Finally, these results are displayed on a monitor or transmitted to the gyroscope-based device to assist the surgical operation. | ||
| − | |||
| − | |||
|} | |} | ||
| − | |||
| − | |||
| − | |||
| − | |||
<!-- ---------------------------- --> | <!-- ---------------------------- --> | ||
{{documentation/{{documentation/version}}/module-section|Use Cases}} | {{documentation/{{documentation/version}}/module-section|Use Cases}} | ||
{| | {| | ||
| − | Puncture surgery (e.g. endoscopic insertion) is a typical example to show the use of this module. This module calculates the distance of the puncture path and the angle between the probe and the reference planes. The module can also transmit the calculation results to the gyroscope-based device to facilitate the surgical operation. | + | *Puncture surgery (e.g. endoscopic insertion) is a typical example to show the use of this module. This module calculates the distance of the puncture path and the angle between the probe and the reference planes. The module can also transmit the calculation results to the gyroscope-based device to facilitate the surgical operation. |
|} | |} | ||
<!-- ---------------------------- --> | <!-- ---------------------------- --> | ||
{{documentation/{{documentation/version}}/module-section|Tutorials}} | {{documentation/{{documentation/version}}/module-section|Tutorials}} | ||
| − | *1 Load MRI/CT images of brain<br>[[File:GyroGuide-Step-1.png|200px]] | + | *1 Load MRI/CT images of brain<br>[[File:GyroGuide-Step-1.png|200px]]<br> |
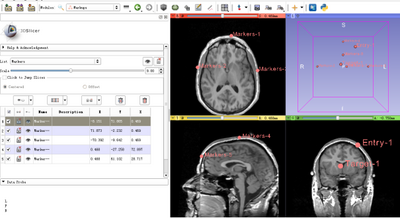
| − | *2 Define “Markers”, “Target Point” and “Entry Point” using the Markups module.<br>[[File:GyroGuide-Step-2.png|400px]] | + | *2 Define “Markers”, “Target Point” and “Entry Point” using the Markups module.<br>[[File:GyroGuide-Step-2.png|400px]]<br> |
| − | *3 Load the defined fiducial lists<br>[[File:GyroGuide-Step-3.png]] | + | *3 Load the defined fiducial lists<br>[[File:GyroGuide-Step-3.png]]<br> |
:Select GyroGuide module | :Select GyroGuide module | ||
: 1 Select the fiducial list - Markers as the markers which define the reference planes. | : 1 Select the fiducial list - Markers as the markers which define the reference planes. | ||
| Line 44: | Line 39: | ||
: 3 Select the fiducial list – Entry as the entry point | : 3 Select the fiducial list – Entry as the entry point | ||
*4 Calculate puncture path information<br> | *4 Calculate puncture path information<br> | ||
| − | :Click the “Calculate” button. The puncture path information will be displayed in the “Results” section.<br>[[File:GyroGuide-Step-4.png|500px]] | + | :Click the “Calculate” button. The puncture path information will be displayed in the “Results” section.<br>[[File:GyroGuide-Step-4.png|500px]]<br> |
*5 Export the results<br> | *5 Export the results<br> | ||
:Input IP address and port of the puncture instrument in the “Exporter” panel. Click “Send”. The calculated puncture path information could be transmitted to the gyroscope-based device to facilitate the surgical operation. | :Input IP address and port of the puncture instrument in the “Exporter” panel. Click “Send”. The calculated puncture path information could be transmitted to the gyroscope-based device to facilitate the surgical operation. | ||
| Line 52: | Line 47: | ||
{| | {| | ||
| − | |[[File:GyroGuide-Panel.png|400px]] | + | |[[File:GyroGuide-Panel.png|400px]]<br> |
*<b>GyroGuide</b><br> | *<b>GyroGuide</b><br> | ||
<b>Markers</b><br> | <b>Markers</b><br> | ||
| Line 73: | Line 68: | ||
<b>Port</b><br>Port of the puncture device. Default: 18944<br> | <b>Port</b><br>Port of the puncture device. Default: 18944<br> | ||
<b>Send Button</b><br> Send the calculated results to the designated puncture device, which supports OpenIGTLink protocol.<br> | <b>Send Button</b><br> Send the calculated results to the designated puncture device, which supports OpenIGTLink protocol.<br> | ||
| − | |||
<!-- ---------------------------- --> | <!-- ---------------------------- --> | ||
Latest revision as of 01:32, 27 January 2014
Home < Documentation < Nightly < Modules < GyroGuide
|
For the latest Slicer documentation, visit the read-the-docs. |
Introduction and Acknowledgements
|
Extension: GyroGuide |

Module Description
- The module should be used in cooperation with “Markups” module. First, it is required to choose five fiducial points to define two mutually-perpendicular planes as the Registration Markers. Second, set a target point and an entry point. Third, click the “Calculate” button to obtain the puncture path information, including the puncture depth and the angles between the puncture path and the reference planes. Finally, these results are displayed on a monitor or transmitted to the gyroscope-based device to assist the surgical operation.
Use Cases
- Puncture surgery (e.g. endoscopic insertion) is a typical example to show the use of this module. This module calculates the distance of the puncture path and the angle between the probe and the reference planes. The module can also transmit the calculation results to the gyroscope-based device to facilitate the surgical operation.
Tutorials
- 1 Load MRI/CT images of brain

- 2 Define “Markers”, “Target Point” and “Entry Point” using the Markups module.
- 3 Load the defined fiducial lists
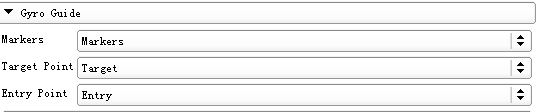



- Select GyroGuide module
- 1 Select the fiducial list - Markers as the markers which define the reference planes.
- 2 Select the fiducial list – Target as the target point
- 3 Select the fiducial list – Entry as the entry point
- 4 Calculate puncture path information
- Click the “Calculate” button. The puncture path information will be displayed in the “Results” section.
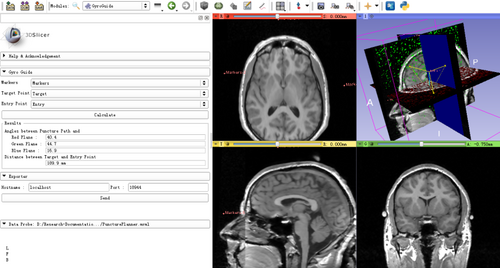

- 5 Export the results
- Input IP address and port of the puncture instrument in the “Exporter” panel. Click “Send”. The calculated puncture path information could be transmitted to the gyroscope-based device to facilitate the surgical operation.
Panels and their use

Markers Target Point Entry Point Calculate Button Similar Modules
References
Information for Developers
|